Abstract – The project aim is the realization and the validation of an autonomous robot to support innovative agricultural approaches on hilly areas belonging to small farmhouses. This project is based on state-of-the-art methods of perception, control and autonomous navigation.
Objectives
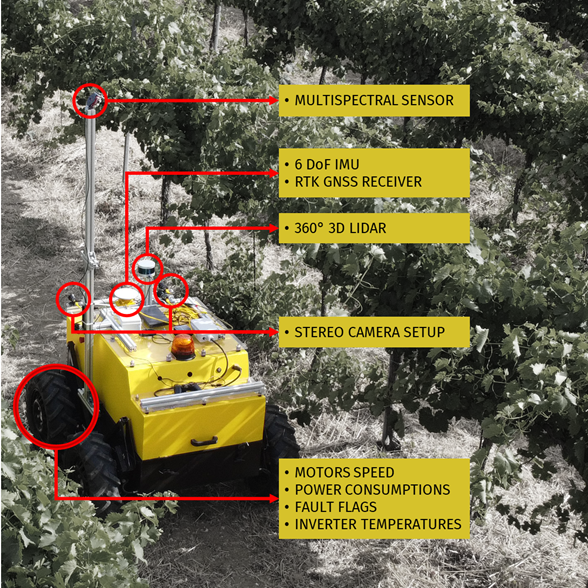
- Development of a stack for autonomous driving based on Global Navigation Satellite System (GNSS), LIDAR, vision and inertial sensors.
- Development of a system for the collection of multispectral images in vineyards to build plant health maps through Normalized Difference Vegetation Index (NDVI).
- Development of a system for the collection and automous elaboration of the images in order to automatically monitor the impact of the olive fly and its damage in the olive groves.
Autonomous driving
The navigation system implemented in AGROBOT is able to:
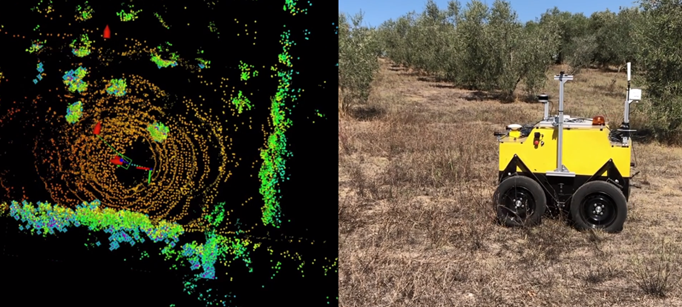
- Localize the vehicle in a known map;
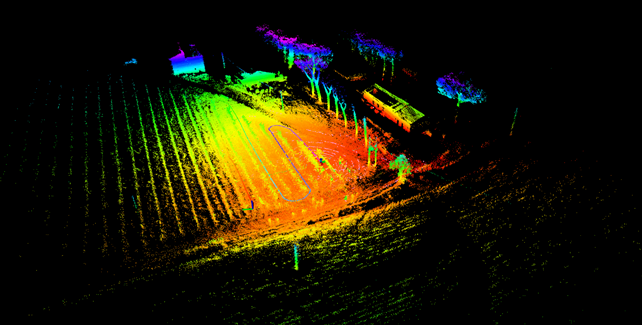
- Improve or build from scratch the map whereby the robot must navigate;
- Navigate in the vineyards with no direct human control.
- Detect and avoid obstacles.
Plant health map building
The objective is to evaluate the plant health of the vineyards through the estimation of the chlorophyll quantity in the grapevine. Specific color spectrums have been analyzed through a multispectral camera, from which NDVI images have been computed. Finally, georeferenced maps have been built from these images.
Olive fly infestation estimation
The estimation of the infestation, with changes of seasons and weather conditions, is obtained by monitoring the pheromone traps and by counting the olive flies bites through a vision-based system and AI algorithms.
Algorithms
This project required the development of several algorithms:
- LIDAR-based SLAM
- Path planning
- Vision-based plant health estimation
- Vision-based infestation detection







Collaborations

